Image1.gif

Image2.gif

Image3.gif
The system relies on some ideas outlined elsewhere [2] to guide target interception of static and moving targets.
For an brief overview of some of the experimental work that undepins this work, please check Simon's research page here .
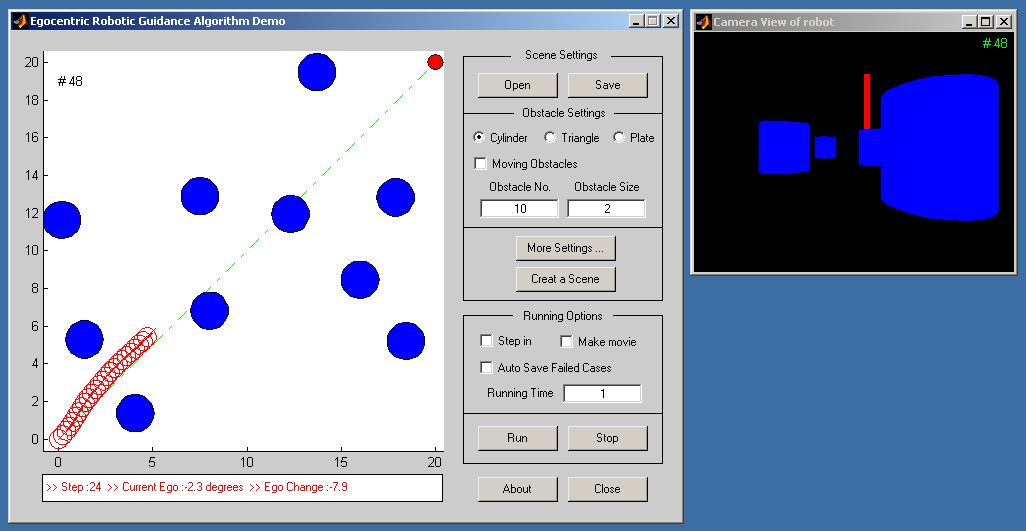
The first assumption of the egocentric model is that approach to a target is based upon maintaining a constant egocentric direction. Simply put, you can intercept a target if on each step you check that the target is at its previous egocentric direction, and if it is not then turn so as to fix this. Provided that the direction you are keeping the target at is less than 90degrees (measured relative to your locomotor axis), then you will reach your target. The path you will take is an equi-angular spiral. Illustrated below are a family of constant-eccentricity trajectories (plan views) that intercept (1) a static target; (2) a target moving with a constant velocity; (3) an accelerating target.
| Image1.gif |
Image2.gif |
Image3.gif |
Sometimes a
system won't be calibrated (eg you don't know whether your target is at
15 degrees or -20 degrees), one way to deal with this is to use target
drift [3] . The image below shows the use of target
drift and over-compensation for guidance of an uncalibrated robot and
calibration.
We also added an obstacle avoidance system that uses basic visual variables such as time-to-contact (TTC; 4 , 5 ), and trajectory [6 ,7 ]. Selection and optimisation of the calculation of these variables is based upon recent experimental findings and computational models [ 8 ].
A simple
control law, derived from work on human interception [ 9
] and body-scaled parameters[10 ] can be used to
produce successful avoidance of static and moving obstacles.
 15 Obstacles_plan_view |
 15 Obstacles camera_view |
 Moving Obstacles_plan_view |
 Moving Obstacles_camera_view |
 Triangle Obstacles plan view |
 Triangle Obstacles camera_view |
 Planar_Obstacles plan view |
 Planar_Obstacles_camera_view |
 Obstacle_size_1_plan_view |
 Obstacle size_1_camera_view |
 Obstacle size_3_plan_view |
 Obstacle size_3_camera_view |
 Obstacle_size_4_plan_view |
Obstacle size_4_camera_view |
We also have a partial implementation on a Nomad robot (lack of space to run the robot being the constraining factor).

|
This work
is in development. Further information is available on request. The
work will be presented at BMCV in November. Others [ 11
, 12 ] have done work on the same problem, using
different approaches. We believe our model has significant advantages.
* Jia Wen,
4080 project, Winter term
If you are
interested in any of these projects please email